Hi, I'm
Allen Tao
I am passionate about building practical robots capable and general enough to perform meaningful tasks in the real world.
I'm currently the Perception Technical Director on the University of Toronto Self-Driving Car Team, researching how to generalize LiDAR perception to unseen environments.
Outside of school, I was fortunate to work on several industry and research projects focused on the application of AI to robotics, detailed below.
Experience
Machine Learning Intern @ Tesla Autopilot
May 2025 – Aug 2025
Foundation Models for end-to-end vision only Full Self-Driving (FSD) used for RoboTaxi launch

Machine Learning Software Developer @ Epson Edge (Epson's R&D wing)
May 2024 – April 2025
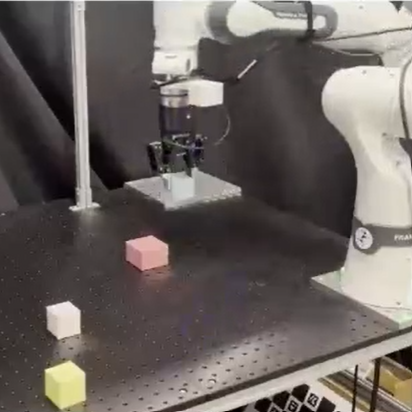
Researching vision language models and high precision manipulator robotics

Undergraduate Researcher @ Robot Vision and Learning Lab
May 2024 – August 2024
Worked on perception for automated domain inference in robotics with Prof. Florian Shkurti

Undergraduate Researcher @ Autonomous Space Robotics Laboratory
May 2023 – Jan 2024
Investigated LiDAR-based indoor navigation for autonomous robots under Prof. Tim Barfoot
Summer Researcher @ Learning Systems and Robotics Lab
May 2022 - Aug 2022
Worked on control barrier functions and code reproducibility in robotics research, supervised by Prof. Angela Schoellig
Publications
Automated Planning Domain Inference for Task and Motion Planning
Jinbang Huang, Allen Tao, Rozilyn Marco, Miroslav Bogdanovic, Jonathan Kelly, Florian Shkurti
ICRA 2025
Paper Link

MakeWay: Object-Aware Costmaps for Proactive Indoor Navigation Using LiDAR
Binbin Xu, Allen Tao, Hugues Thomas, Jian Zhang, Timothy D. Barfoot
CRV 2025 (Oral)
Paper Link
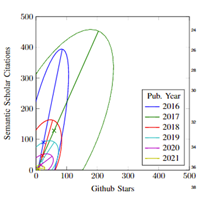
What is the Impact of Releasing Code with Publications? Statistics from the Machine Learning, Robotics, and Control Communities
Siqi Zhou, Lukas Brunke, Allen Tao, Adam W. Hall, Federico Pizarro Bejarano, Jacopo Panerati, Angela P. Schoellig
IEEE Control Systems Magazine
Paper Link
Education

University of Toronto (cGPA: 3.98/4.0)
- BASc. in Engineering Science | 2021-2026
- Robotics Major, Artificial Intelligence Minor
Relevant Courses: Deep Learning (PyTorch), Machine Learning, Mobile Robotics, Control Systems, Numerical Methods, Bayesian & Probabilistic Methods, Dynamics, Embedded Systems, Operating Systems, Digital & Computer Systems
Projects & Competitions
Search projects by title or filter by category

An Eye for an Item
A robot that finds your lost items in general unstructured indoor environments
1st place internationally at NVIDIA + Sparkfun Innovation Challenge
Category: Personal Project
Self-Driving Car 3D Perception
LiDAR perception for aUToronto's self-driving car to compete in the SAE AutoDrive Challenge
1st place sweep at 2024 SAE AutoDrive Challenge
Category: Design Team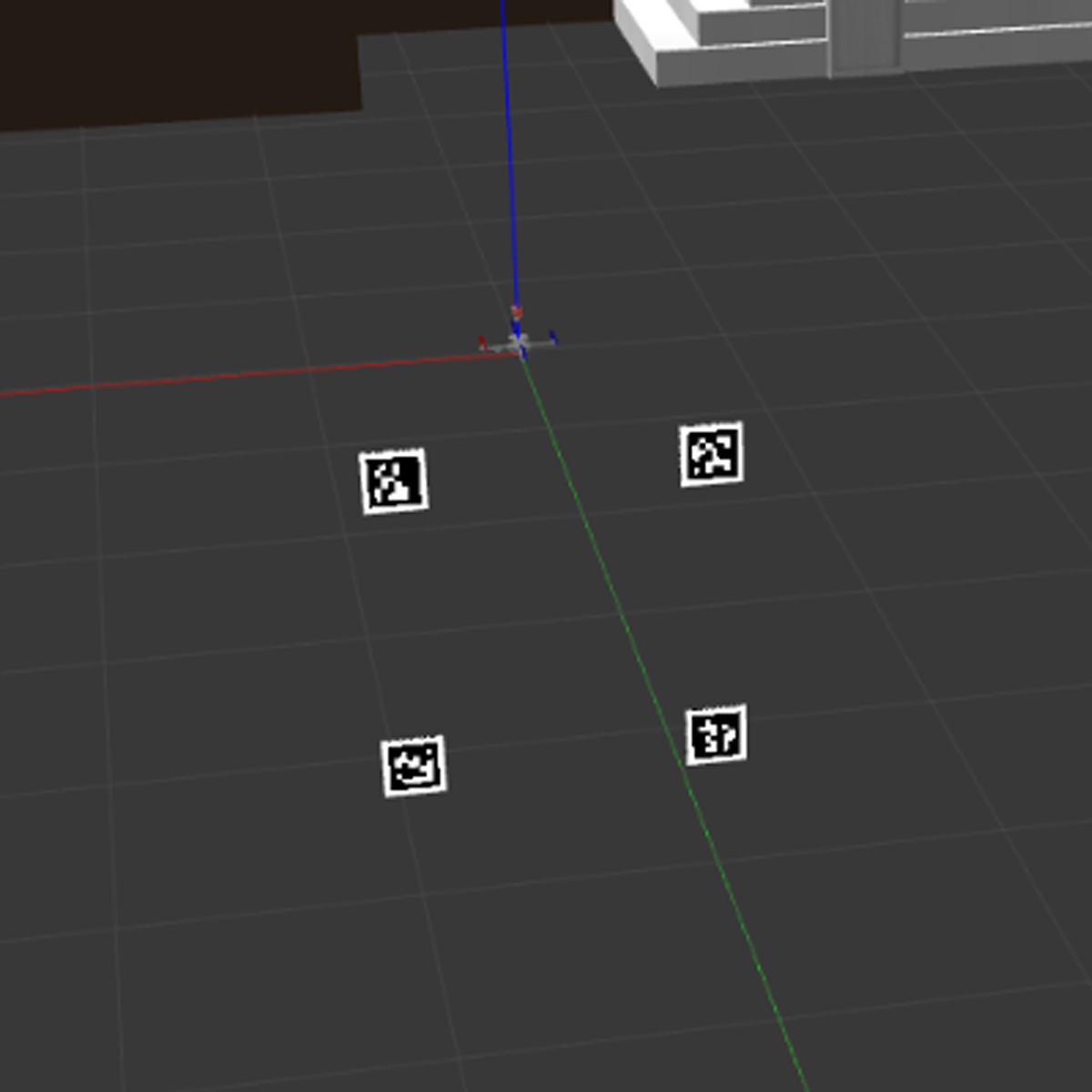
Autonomous Racing Drone Localization
State estimation for an autonomous racing drone for UTAT ADR
Category: Design Team

UTAT UAS: Cyclone
Designing an autonomous hexacopter for the AEAC National UAS Challenge
2nd/3rd place Design Report in Canada at AEAC UAS Competition in 2023/2024
Category: Design Team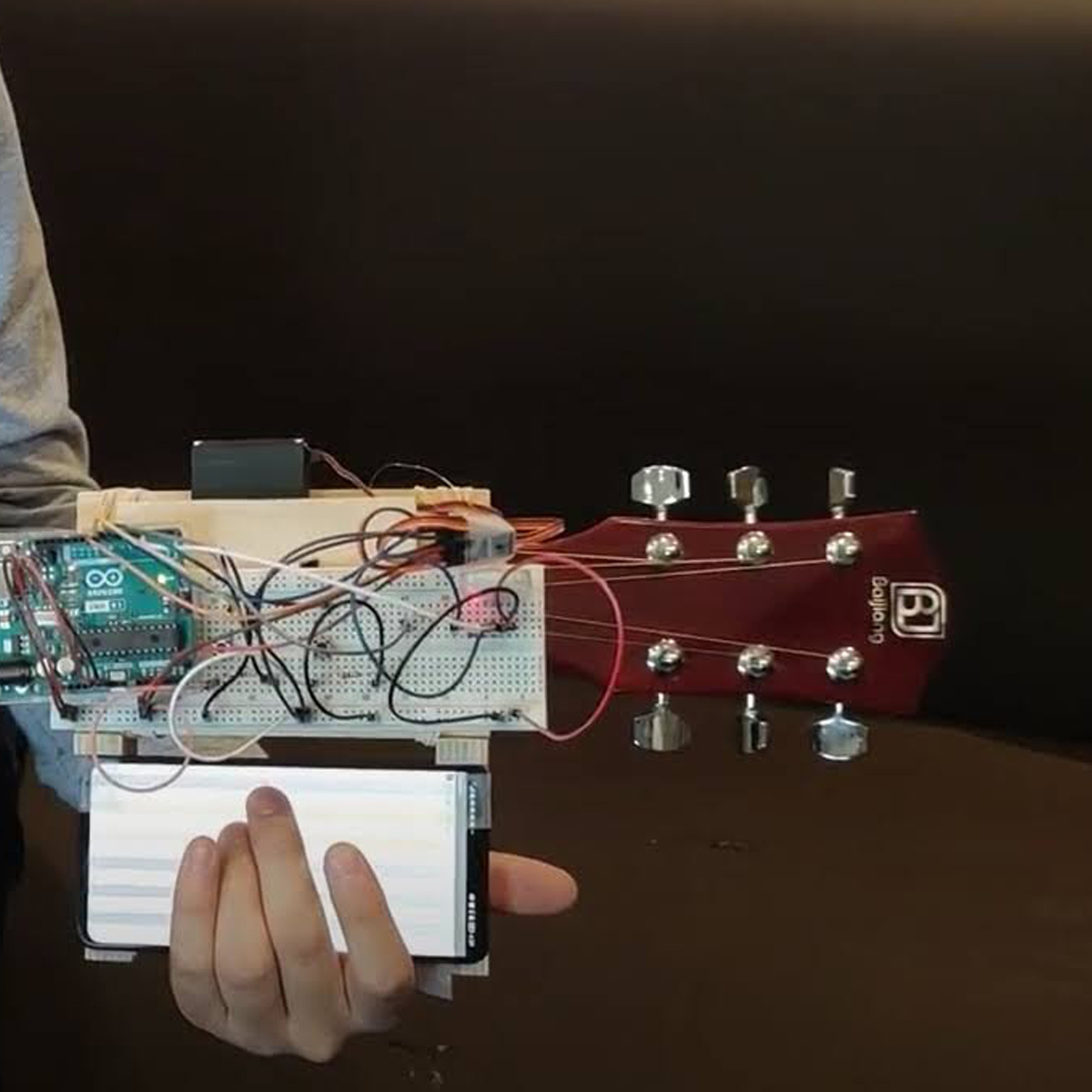
Touch Guitar
Helping those with arthritis play the guitar
Category: Coursework

Autoaim Crossbow
Autonomously detect, aim and shoot targets
Category: Personal Project
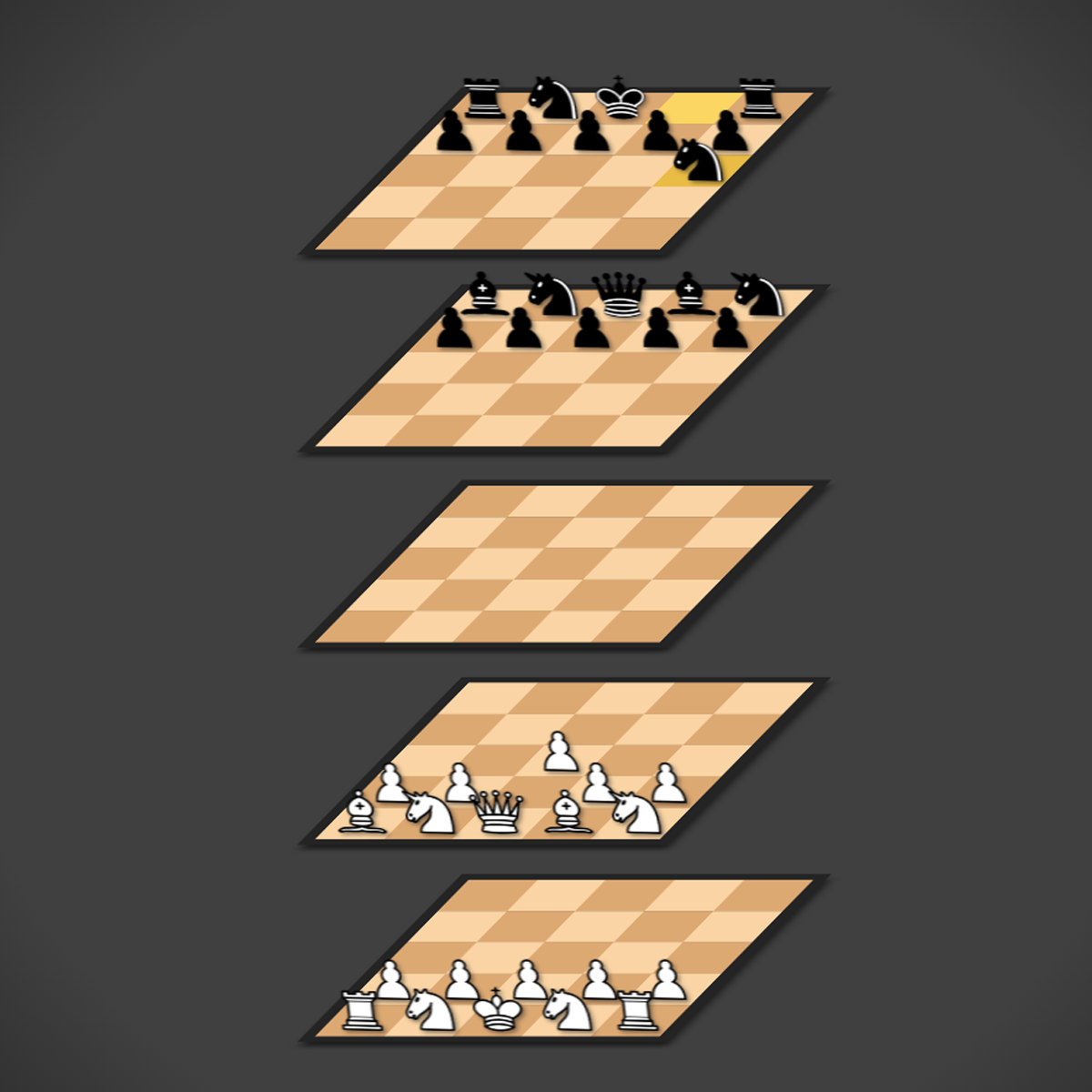
3D Chess
A full implementation of the Raumschach variant of 3D Chess, play PVP or against AI
Category: Coursework

VEX Robotics Competition
Team Captain, Lead Builder, Programmer, Driver
8th place internationally at VEX World Skills Championships in 2021
Category: Design Team