Autonomous Racing Drone Localization

Objective
Develop a fully autonomous autopilot that races a quadcopter around a series of gates, using only an onboard camera, IMU, and companion computer.
Tools & Technologies
ROS, C++, NVIDIA Jetson, Computer Vision, OpenCV, Gazebo, Extended Kalman Filter, Visual Inertial Odometry
Challenge
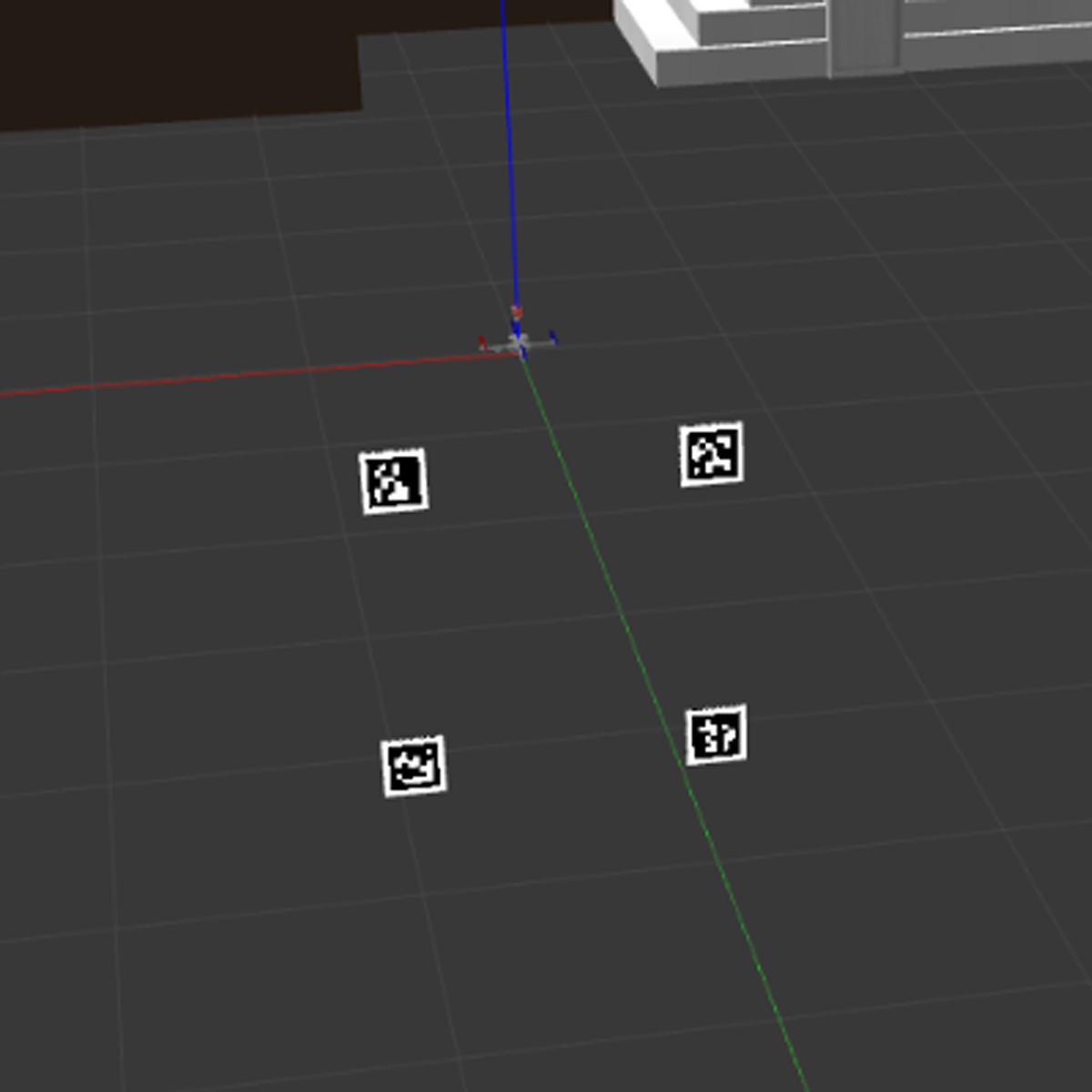
The Autonomous Drone Racing team is working on developing a fully autonomous racing drone, both in simulation (Gazebo, FlightGoggles), and on real hardware. Most notably, this involves developing the localization, control, and planning components.
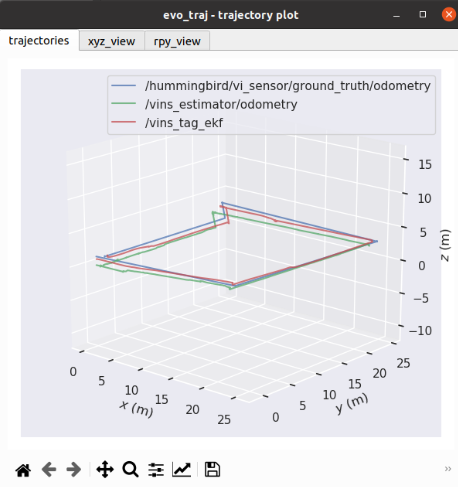
I am currently leading development on the localization component, using visual inertial odometry as well as the extended Kalman filter to better localize the drone at high speed.